Details
-
Bug
-
Resolution: Fixed
-
 Major
Major
-
None
-
Real hardware - revision 67827
Processor: AMD Athlon(tm) 64 Processor 3200+
Memory: 1Gb
Chipset: nVidia nForce3
Ethernet Controller (rev a2) (on motherboard)
PCI Ethernet card with RTL8139 chip
Multimedia audio controller (on motherboard)
FireWire (IEEE 1394) (on motherboard)
VGA compatible controller: nVidia Corporation NV34 [GeForce FX 5200] (rev a1) (Graphics card)
Hard drive: ATA WDC WD400BB-00DK (38Gb in 4 partitions. C: 14.9Gb)
Optical drive: PIONEER DVD-RW DVR-112
Floppy drive (1.44Mb)
PS2 mouse.
PS2 keyboard.Real hardware - revision 67827 Processor: AMD Athlon(tm) 64 Processor 3200+ Memory: 1Gb Chipset: nVidia nForce3 Ethernet Controller (rev a2) (on motherboard) PCI Ethernet card with RTL8139 chip Multimedia audio controller (on motherboard) FireWire (IEEE 1394) (on motherboard) VGA compatible controller: nVidia Corporation NV34 [GeForce FX 5200] (rev a1) (Graphics card) Hard drive: ATA WDC WD400BB-00DK (38Gb in 4 partitions. C: 14.9Gb) Optical drive: PIONEER DVD-RW DVR-112 Floppy drive (1.44Mb) PS2 mouse. PS2 keyboard.
Description
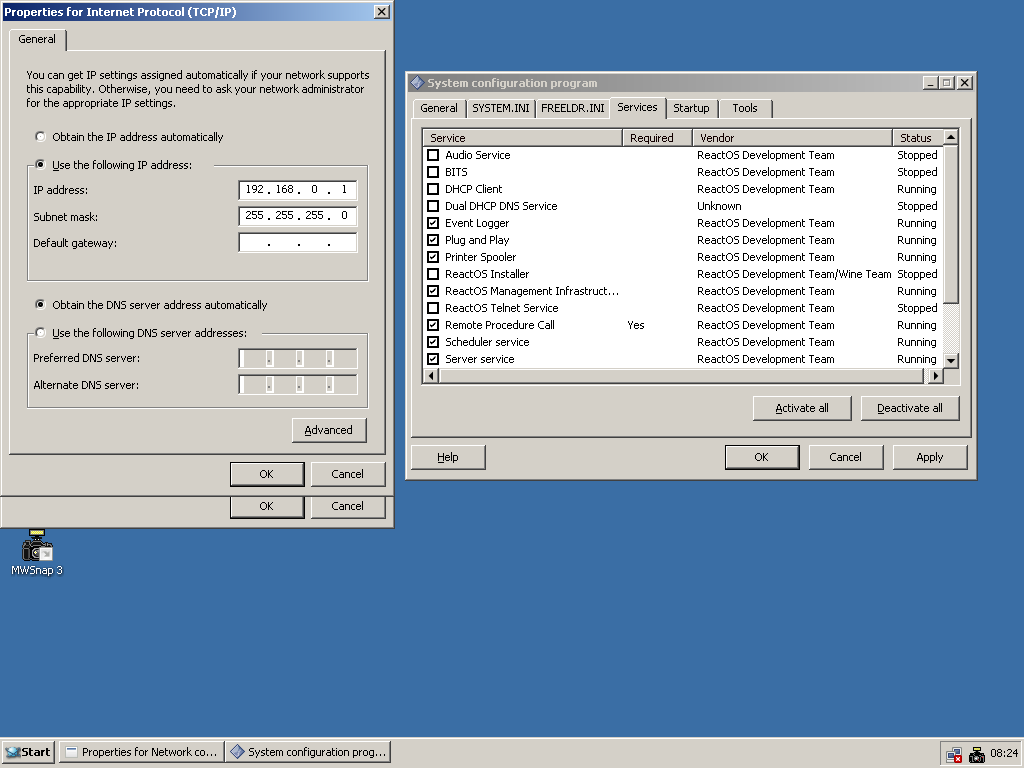
The default IP settings in Ros are: to run a DHCP client and get an IP address from a server. If you set the IP manually and disable the DHCP client, then reboot; when you check your alterations, you find they are back at the defaults.
See IP-before.png and IP-after.png